publications
publications by categories in reversed chronological order. generated by jekyll-scholar.
2025


2024
-
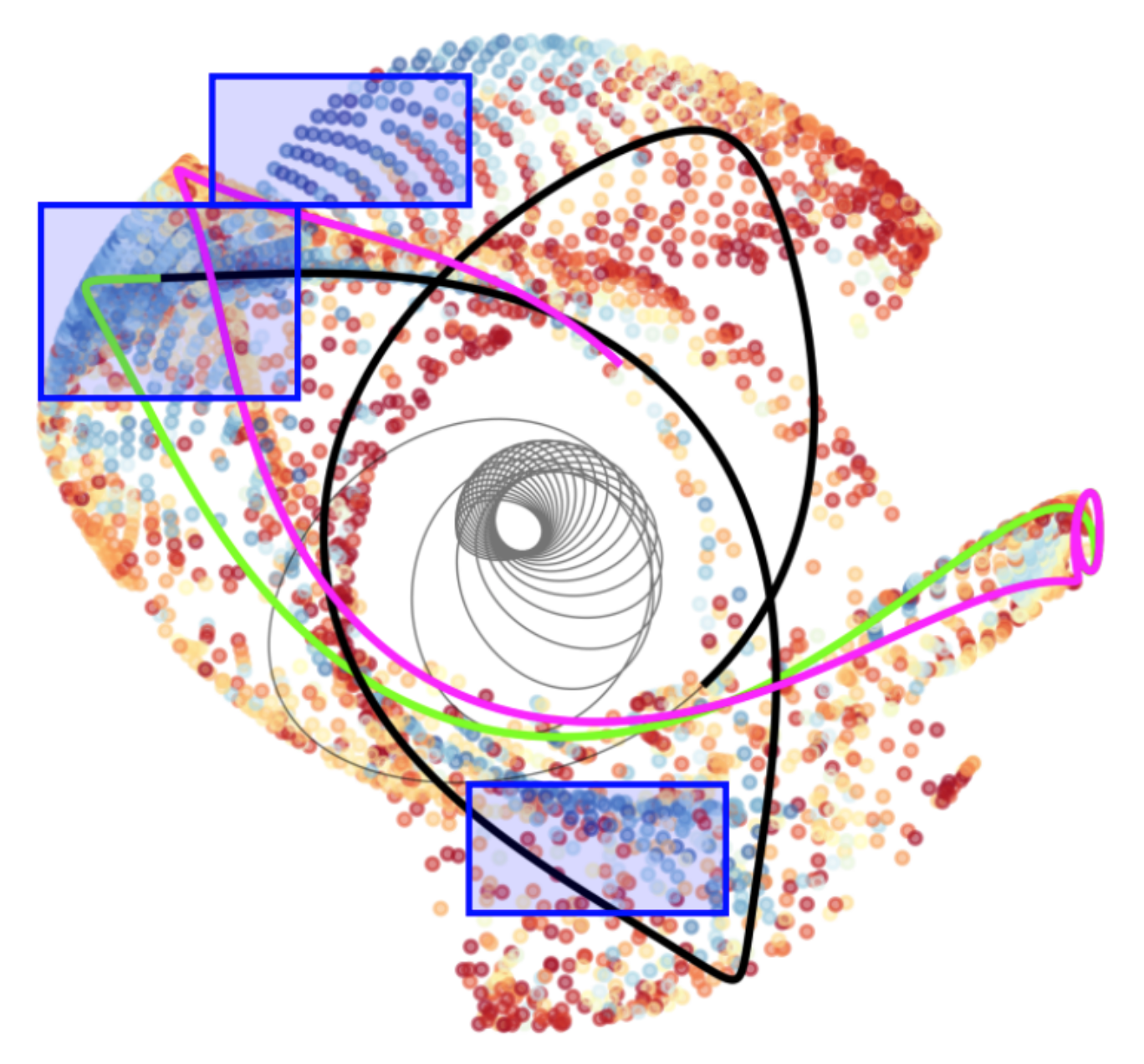 Learning Optimal Control and Dynamical Structure of Global Trajectory Search Problems with Diffusion ModelsAAS/AIAA Astrodynamics Specialist Conference, 2024
Learning Optimal Control and Dynamical Structure of Global Trajectory Search Problems with Diffusion ModelsAAS/AIAA Astrodynamics Specialist Conference, 2024 -
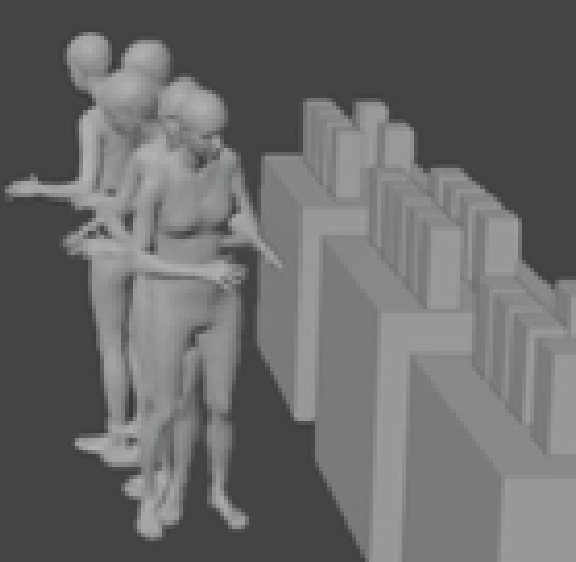 Predicting Long-Term Human Behaviors in Discrete Representations via Physics-Guided DiffusionIn IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024
Predicting Long-Term Human Behaviors in Discrete Representations via Physics-Guided DiffusionIn IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024 -
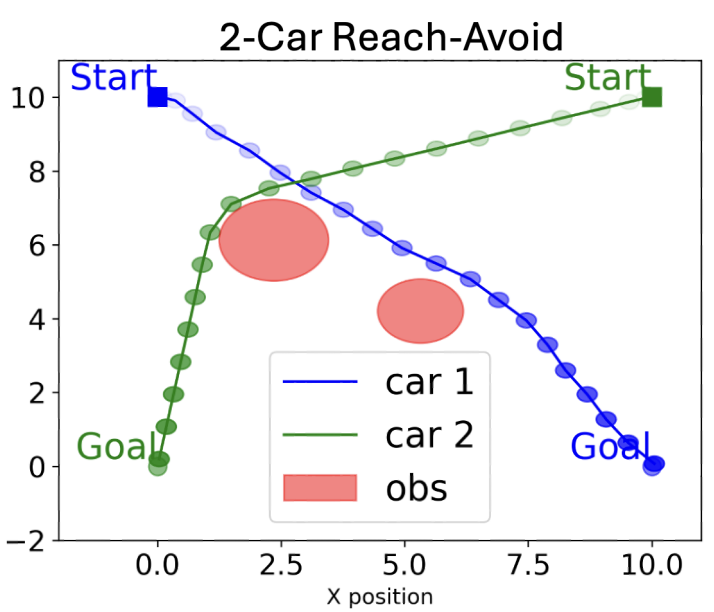 Constraint-Aware Diffusion Models for Trajectory Optimization5th International Conference of Dynamic Data Driven Applications Systems (DDDAS), 2024
Constraint-Aware Diffusion Models for Trajectory Optimization5th International Conference of Dynamic Data Driven Applications Systems (DDDAS), 2024



2023
-
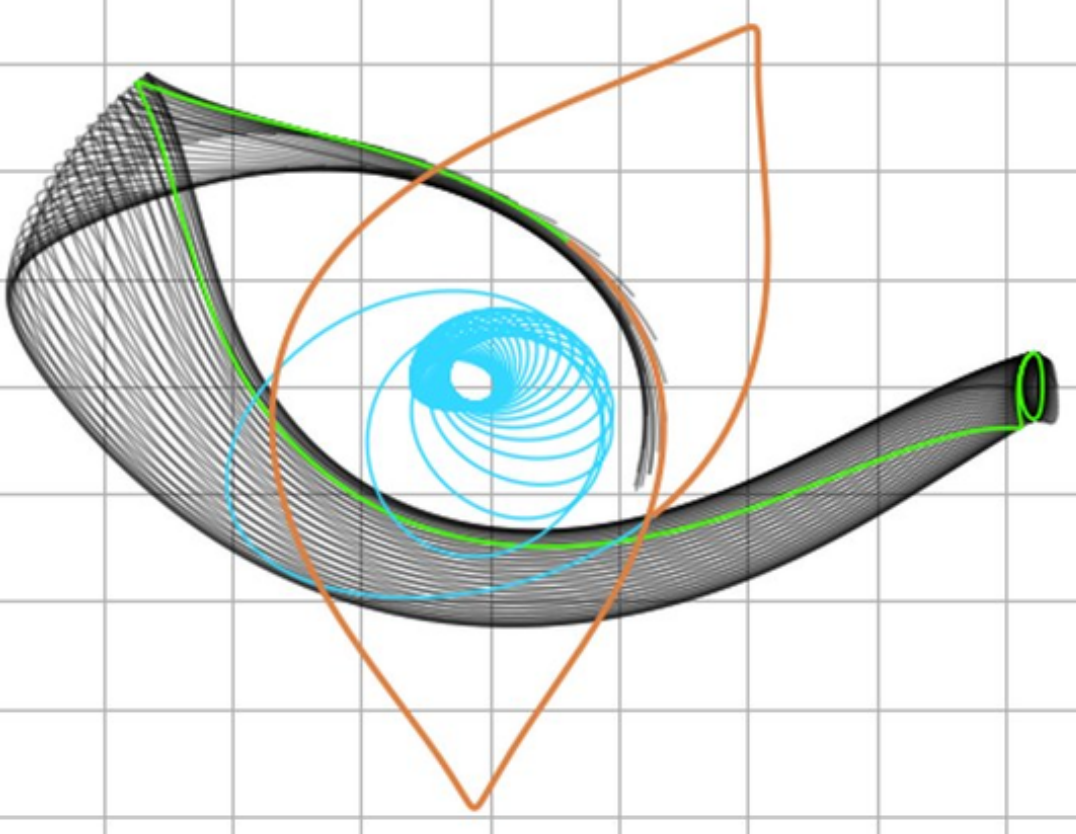 Amortized Global Search for Efficient Preliminary Trajectory Design with Deep Generative ModelsAAS/AIAA Astrodynamics Specialist Conference, 2023
Amortized Global Search for Efficient Preliminary Trajectory Design with Deep Generative ModelsAAS/AIAA Astrodynamics Specialist Conference, 2023

2021

2020
-
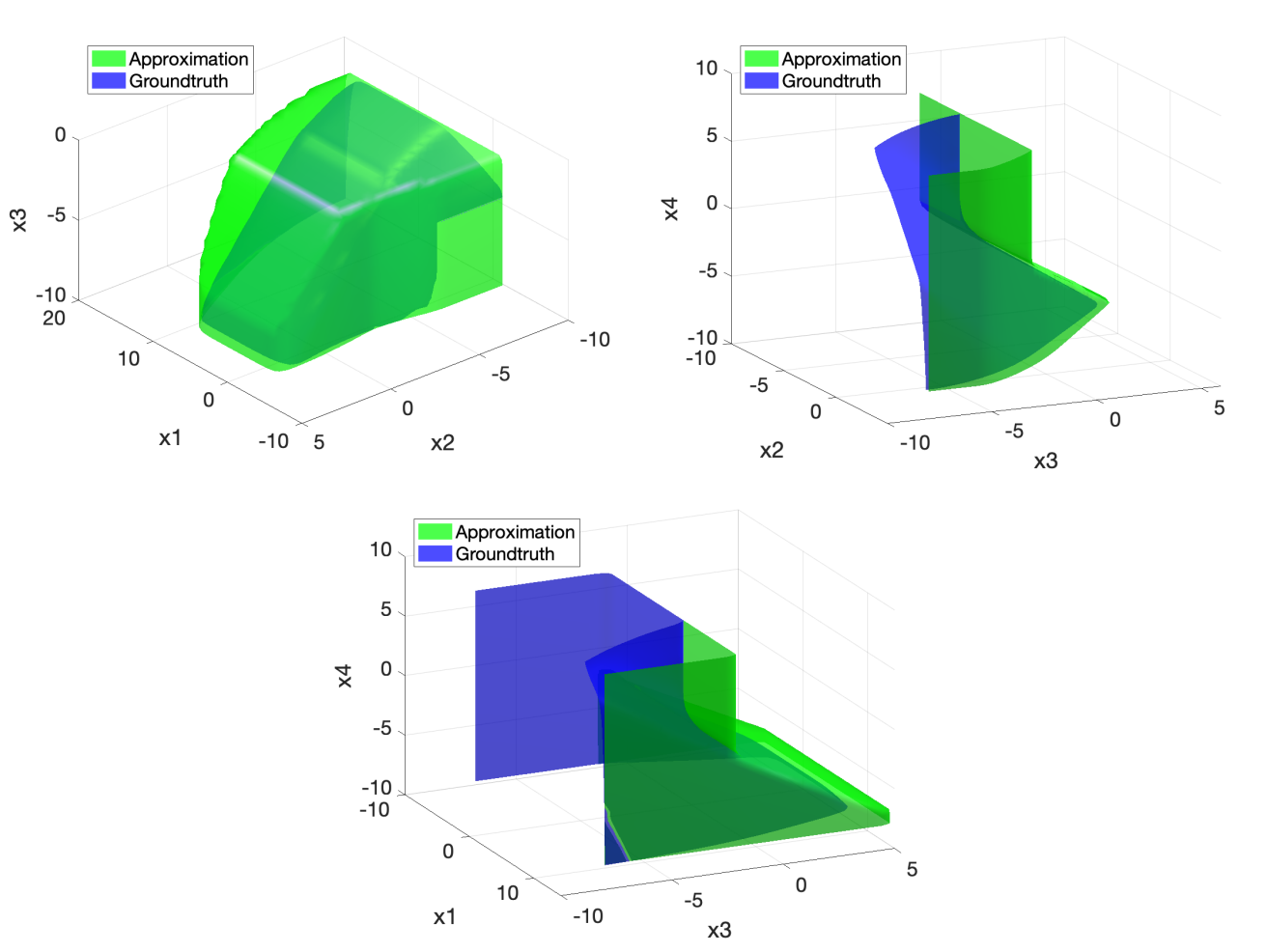 Guaranteed-safe Approximate Reachability via State Dependency-based DecompositionIn American Control Conference (ACC), 2020
Guaranteed-safe Approximate Reachability via State Dependency-based DecompositionIn American Control Conference (ACC), 2020

